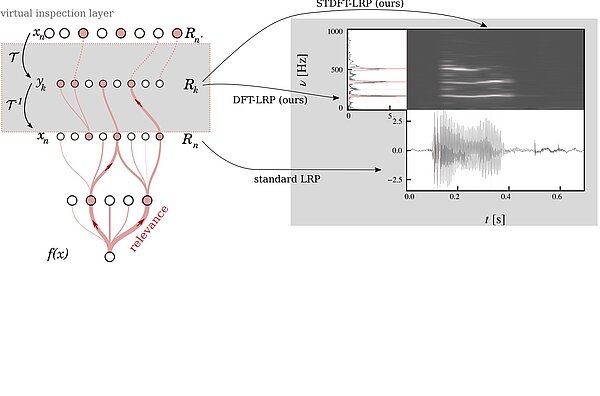
Explainable AI for Time Series via Virtual Inspection Layers
For time series data, where the input itself is often not interpretable, dedicated XAI research is scarce. In this work, we put forward a virtual inspection layer for transforming the time series to an interpretable representation and allows to...
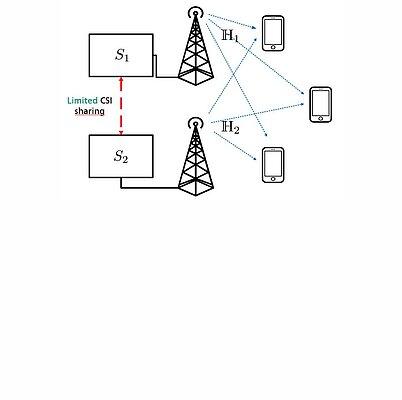
UL-DL Duality for Cell-Free Massive MIMO With Per-AP Power and Information Constraints
This article advances the theoretical foundations of user-centric cell-free massive MIMO networks. In particular, by means of a novel UL-DL duality principle for fading channels, it settles the optimality of the recently developed “team MMSE”...
Towards an AI-enabled Connected Industry: AGV Communication and Sensor Measurement Datasets
We present iV2V and iV2i+, two machine-learning datasets for industrial wireless communication. The datasets cover sidelink and cellular communication involving autonomous robots together with localization and sensing data, which can be used to...
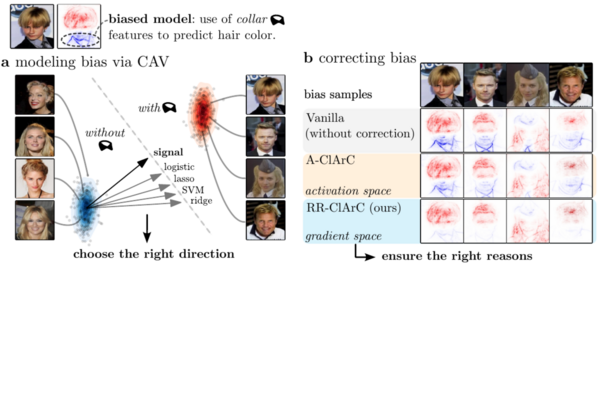
From Hope to Safety: Unlearning Biases of Deep Models via Gradient Penalization in Latent Space
We present a novel method ensuring the right reasons on the concept level by reducing the model's sensitivity towards biases through the gradient. When modeling biases via Concept Activation Vectors, we highlight the importance of choosing robust...
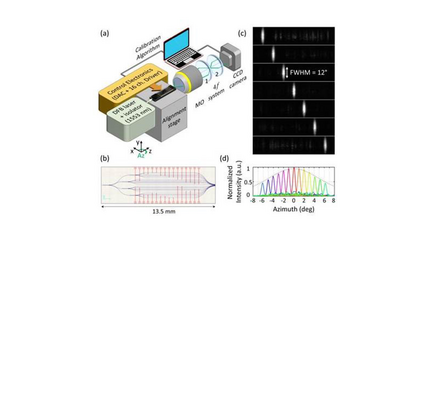
Sparse Aperiodic Optical Phased Arrays on Polymer Integration Platform
Solid-state optical beam-steering utilizing polymer waveguides as edge emitters to form optical phased arrays (OPAs) with aperiodic spacing for operation at 1550 nm is demonstrated for the first time. Power consumption of 1.28 mW/? per channel is...

Little or No Equalization is Needed in Energy-Efficient Sub-THz Mobile Access
We validate experimentally the claim that, in sub-THz mobile access networks, single-carrier or low-number-of-subcarriers modulations are very attractive competitors to the dramatically more complex and energy-inefficient traditional...
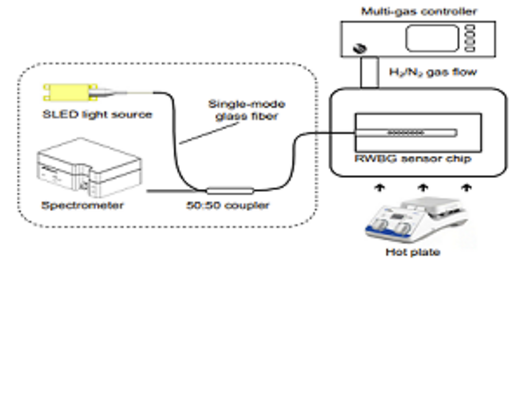
Polymer Waveguide Sensor Based on Evanescent Bragg Grating for Lab-on-a-Chip Applications
This work integrates an evanescent Bragg grating sensor into a polymer waveguide with microchannels. The sensor, built with epoxide-based polymers, is characterized through chemical applications. Temperature sensitivity is demonstrated (-47.75...
Multispectral Stereo-Image Fusion for 3D Hyperspectral Scene Reconstruction
We present a novel approach combining two calibrated multispectral real-time capable snapshot cameras, covering different spectral ranges, into a stereo-system. Therefore, a hyperspectral data-cube can be continuously captured. The combined use...

Towards Better Morphed Face Images Without Ghosting Artifacts
We propose a method for automatic prevention of ghosting artifacts based on a pixel-wise alignment during morph generation. We evaluate our proposed method on state-of-the-art detectors and show that our morphs are harder to detect, particularly,...
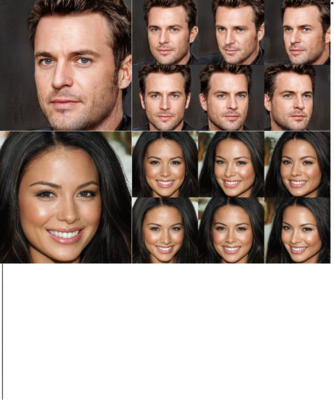
Multi-View Inversion for 3D-aware Generative Adversarial Networks
Our method builds on existing state-of-the-art 3D GAN inversion techniques to allow for consistent and simultaneous inversion of multiple views of the same subject. We employ a multi-latent extension to handle inconsistencies present in dynamic...
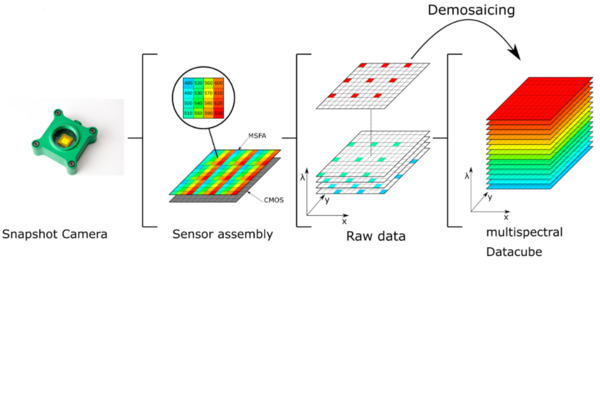
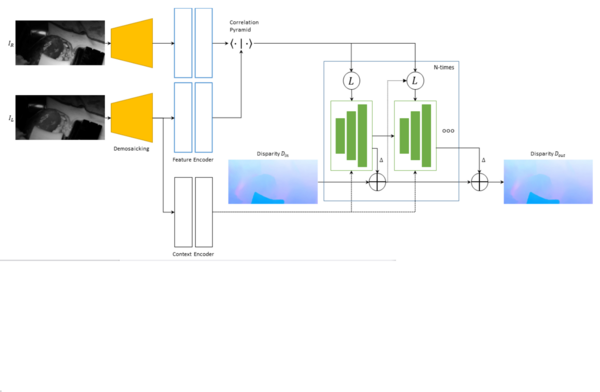
Efficient and Accurate Hyperspectral Image Demosaicing with Neural Network Architectures
This study investigates the effectiveness of neural network architectures in hyperspectral image demosaicing. We introduce a range of network models and modifications, and compare them with classical interpolation methods and existing reference...
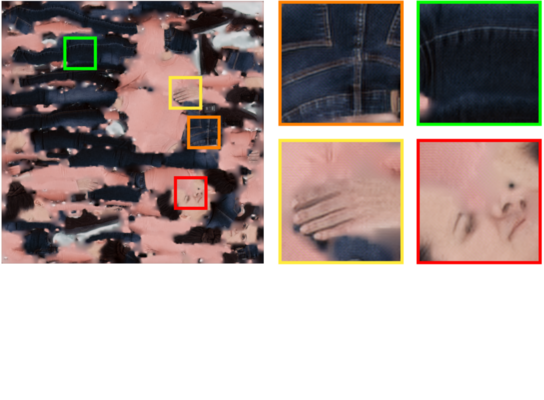
Generative Texture Super-Resolution via Differential Rendering
We propose a generative deep learning network for texture map super-resolution using a differentiable renderer and calibrated reference images. Combining a super-resolution generative adversarial network (GAN) with differentiable rendering, we...
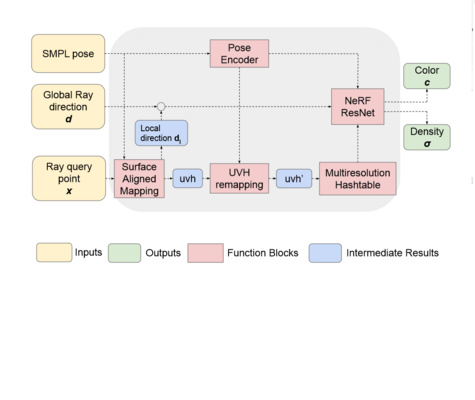
Animating NeRFs from Texture Space: A Framework for Pose-Dependent Rendering of Human Performances
We introduce a novel NeRF-based framework for pose-dependent rendering of human performances where the radiance field is warped around an SMPL body mesh, thereby creating a new surface-aligned representation. Our representation can be animated...
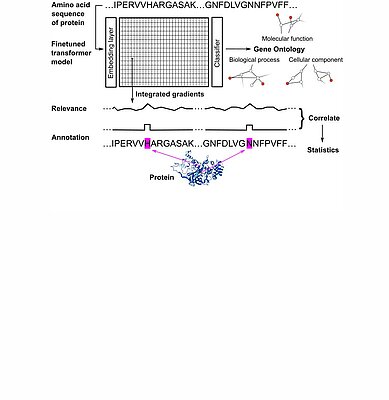
Insights into the inner workings of transformer models for protein function prediction
We explored how explainable artificial intelligence (XAI) can help to shed light into the inner workings of neural networks for protein function prediction, by extending the widely used XAI method of integrated gradients such that latent...
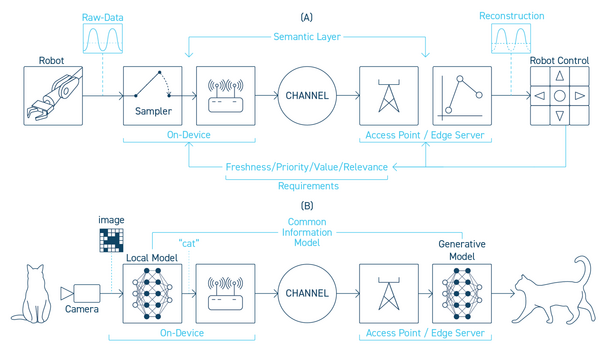
Semantic Communication for Edge Intelligence: Theoretical Foundations and Implications on Protocols
Recent attention to semantic communication, driven by task-oriented solutions, aims to optimize resource use. Despite perceived efficiency gains, few practical implementations exist. This paper revisits theoretical foundations, emphasizing...

Towards an AI-enabled Connected Industry: AGV Communication and Sensor Measurement Datasets
We present iV2V and iV2i+, two machine-learning datasets for industrial wireless communication. The datasets cover sidelink and cellular communication involving autonomous robots together with localization and sensing data, which can be used to...
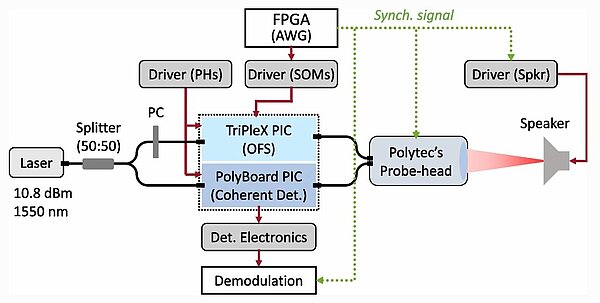
Integrated heterodyne laser Doppler vibrometer based on stress-optic frequency shift in silicon nitride
We demonstrate a compact heterodyne Laser Doppler Vibrometer (LDV) based on the realization of optical frequency shift in the silicon nitride photonic integration ! platform (TriPleX). The system comprises a dual-polarization coherent detector...
Hybrid integration of Polymer PICs and InP optoelectronics for WDM and SDM terabit intra-DC optical interconnects
This paper presents a hybrid photonic integration concept based on the use of a polymer motherboard, InP EML arrays and InP PD arrays to realize WDM and SDM Terabit optical engines operating at 100-Gb/s or even at 20! 0-Gb/s per lane. The optical...
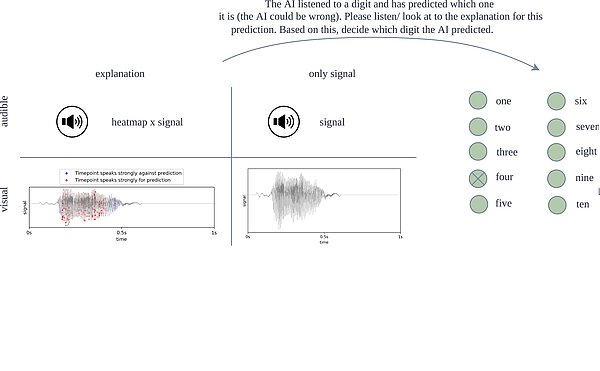
AudioMNIST: Exploring Explainable Artificial Intelligence for Audio Analysis on a Simple Benchmark
Explainable Artificial Intelligence (XAI) is targeted at understanding how models perform feature selection and derive their classification decisions. This paper explores post-hoc explanations for deep neural networks in the audio domain....

A Performance Comparison of OFDM and Pulsed PHY Modulations in Optical Wireless Communications
Experimental tests of the OFDM and OOK-based PHYs in the Li-Fi standard IEEE 802.15.13-2023 show that the higher peak data rates of OFDM and the longer reach of OOK make them suitable for deployment in down- and uplink use cases, respectively.